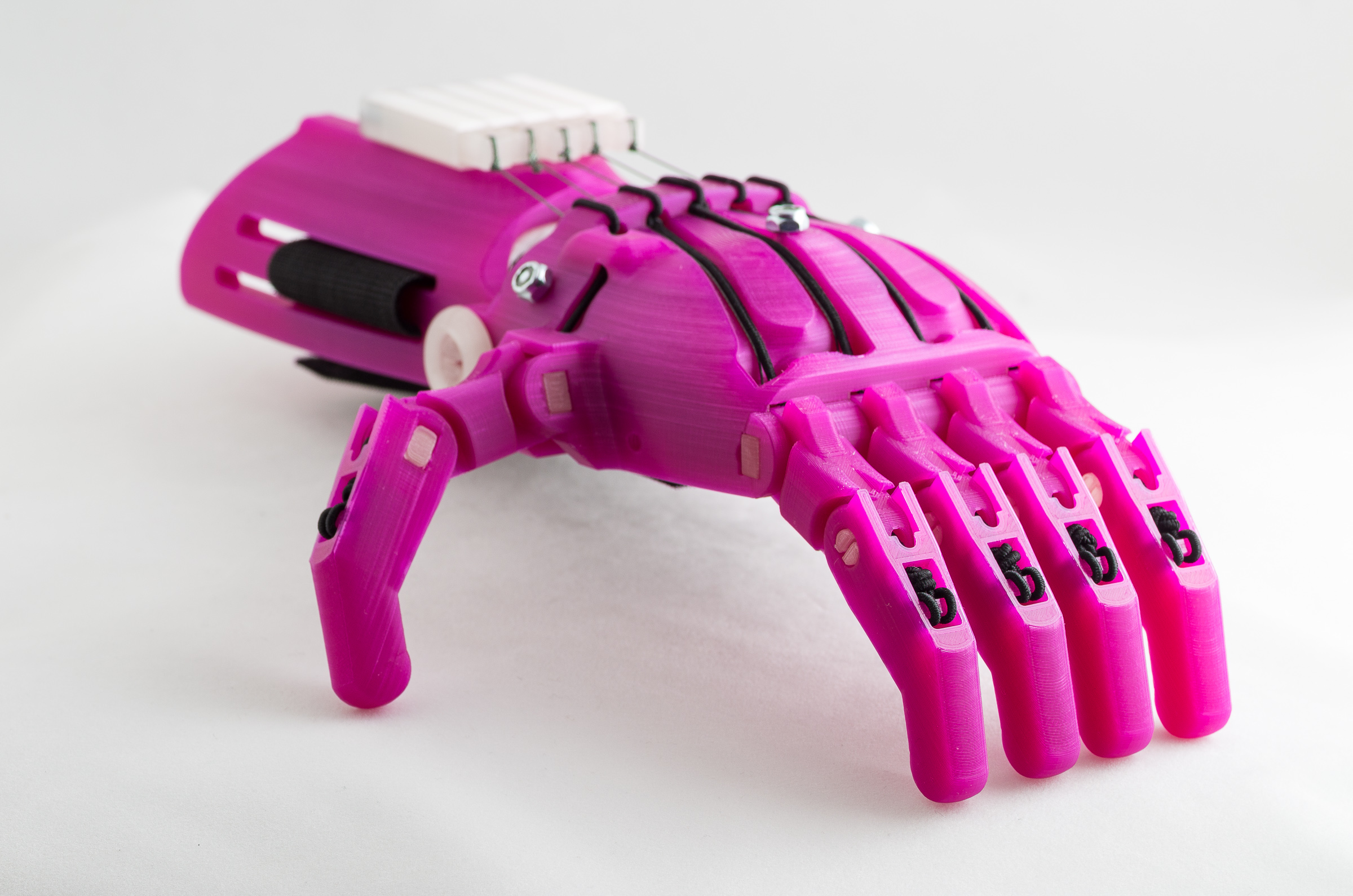
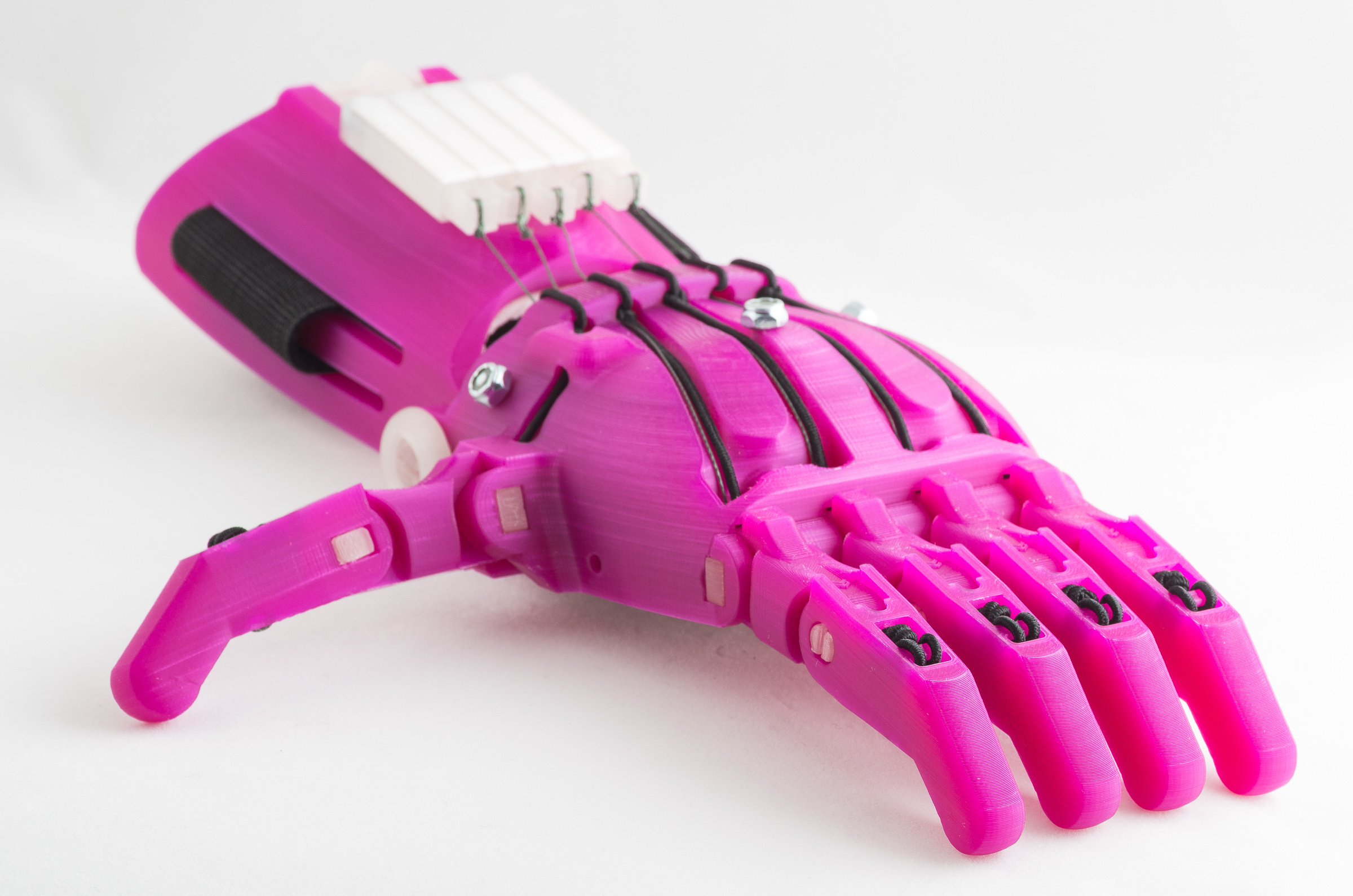
Recently printed a test hand to send to e-NABLE, a community of volunteers who make free prosthetics like the one below for those who need them.

- Raptor Reloaded, scaled to 140% of original
- printed on a modified RigidBot
- transparent purple PLA from 3D Supply Source and clear MadeSolid PET+
- 150 micron layer height
- 100% infill
- 0.4mm nozzle (line width adjusted per part)
- assembly kit from 3D Universe
- sliced with Simplify3D



{kind=link}
The default print tolerances resulted in joints that were fairly loose on my printer, even at 100% scale. When I checked some of the tolerances in the model, it looks like it was designed with 0.2 to 0.4mm gaps which get scaled up along with the rest of the model. I took some notes on the scale factors I used to get a better fit (140% version) on my printer, they’re the starting values I’ll use next time around. These are values for my RigidBot so I don’t expect they’ll work as-is on other printers, but may it give you an idea of values to try.
- Palm: no change
- Gauntlet: no change (but washers were added for the gap between the palm and gauntlet)
- Fingertip: z adjusted -0.1mm
- Fingertip Pin: 10% larger radially
- Thumb Pin: 5% larger radially
- Proximal: 10% wider (could have been be wider)
- Knuckle Pin: 5% larger radially
- Wrist Cap: no change
- Wrist Pin: 7.5% larger radially, 5% shorter
- Tensioner Block: 2% larger (all dimensions)
- Tensioner Pin: 12.5% larger (tight fit, maybe a bit smaller next time), length unchanged, model re-exported from Fusion360 with the holes resized from 3mm to 2.5mm (before scaling)
- Tensioner Clip: no change
The percentage increases are modifiers on the scaled print size (e.g. 10% larger than 140% is 140% * 1.10 = 154% of original size).